
S21-Project32
Project 32: Naughty Nautiloids
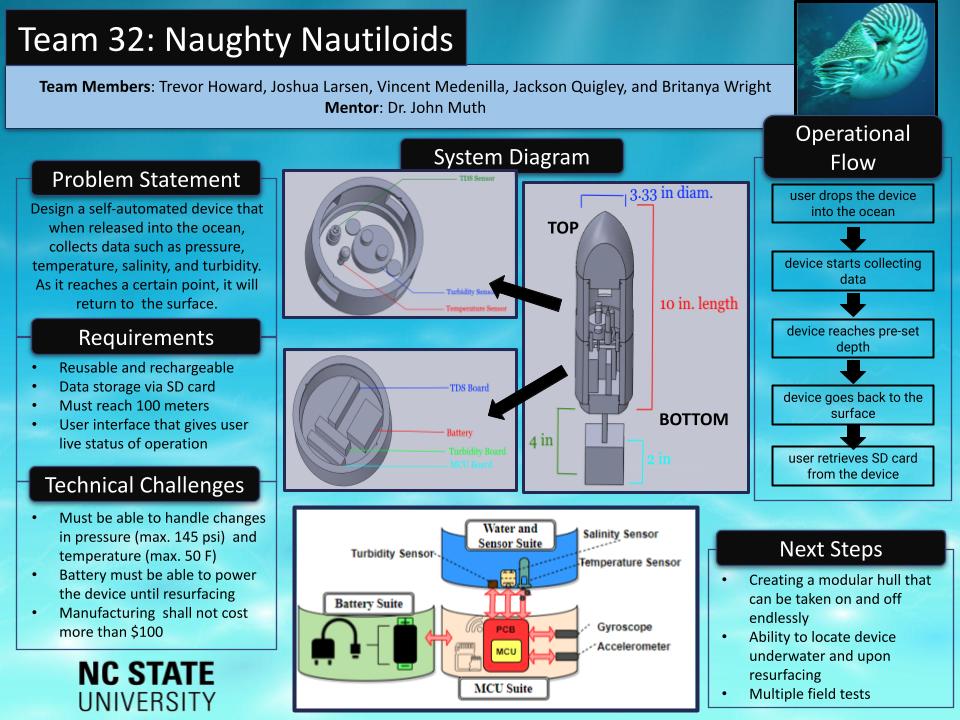
In order to test various qualities about the ocean as a function of its depth, scientists and research groups have been using expendable bathythermographs. While able to quickly collect data about the ocean as a function of its depth, these devices provide no real functionality in terms of reusability. The nautiloid inspired robot aims to address this issue by not only providing reusability but additional functionality as well. The robot will be under 18in in length and 3in in width. As it is thrown into the body of water it will fall and collect information about the water (turbidity, salinity, and temperature). It will continue to travel downward until it reaches its desired depth of between 0-100m and once its target depth is reached, it will change its buoyancy and return to the surface of the water and the gathered data will be transmitted and/or collected from an SD card.
Team Members
- Trevor Howard
- Jackson Quigley
- Vincent Medenilla
- Joshua Larsen
- Britanya Wright
Sponsor
- NCSU – Dr John Muth