
S21-Project03
Project 03: Control Removers Of Weeds System
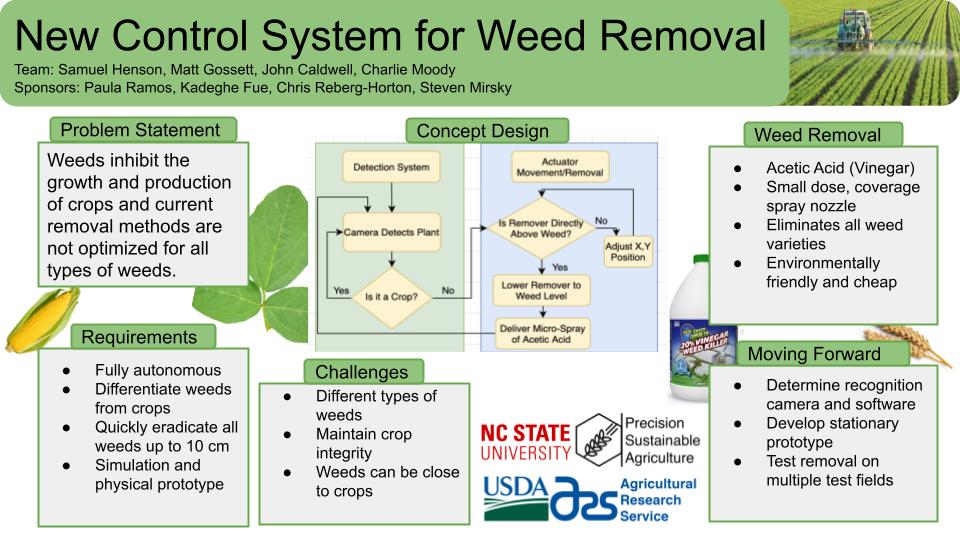
One of agriculture’s main obstacles in farming is weed growth. When left alone, weeds can steal nutrients and outgrow crops lowering overall crop yield. Farmers today are searching for optimized ways to neutralize these weeds in their fields. Our objective is to design a system that autonomously detects an array of weeds, moves the actuator to the respective location, and effectively removes each weed. The system consists of three main subparts: the camera system, the weed-neutralization system, and the robot-motion system. This technology can then be scaled to fit the various needs of different farming operations, creating a system that limits its environmental impact while maximizing crop yield and ease of use to the consumer.
Team Members
- John Caldwell
- Matt Gossett
- Samuel Henson
- Charlie Moody
Sponsor
- NCSU